普通GPIO模拟SPI通信协议(软件SPI)
本文共 8478 字,大约阅读时间需要 28 分钟。
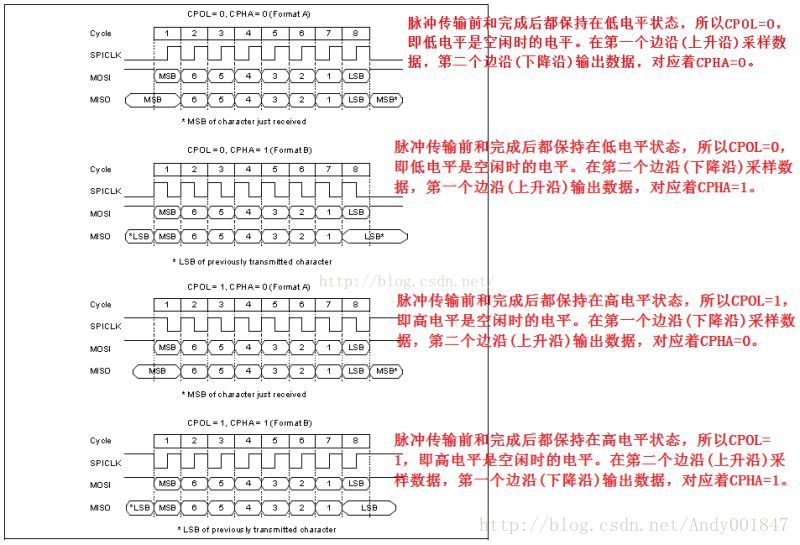
在工作中偶尔会遇到SPI不够用的情况,而我们又要去使用SPI通信协议,此时就需要我们自己去模拟SPI通信协议。我们知道SPI通信协议有四种模式,它们分别如下所示:
 下面是我基于ATSAM4SD16B芯片在Atmel Studio上用普通GPIO模拟的SPI通信协议的代码:
下面是我基于ATSAM4SD16B芯片在Atmel Studio上用普通GPIO模拟的SPI通信协议的代码: #include "ioport.h"#include "pio.h"#include "delay.h"#include "SAM4S_FSA.h"#include// Define 4 SPI pins#define CS IOPORT_CREATE_PIN(PIOA, 8)#define SCLK IOPORT_CREATE_PIN(PIOA, 7)#define MOSI IOPORT_CREATE_PIN(PIOA, 23)#define MISO IOPORT_CREATE_PIN(PIOA, 20)#define SPIDelay delay_us(1)// Define SPI communication modetypedef enum SPIMode{ Mode_1, /* Clock Polarity is 0 and Clock Phase is 0 */ Mode_2, /* Clock Polarity is 0 and Clock Phase is 1 */ Mode_3, /* Clock Polarity is 1 and Clock Phase is 0 */ Mode_4, /* Clock Polarity is 1 and Clock Phase is 1 */}SPIMode;// Define SPI typetypedef enum SPIType{ SPIMaster, SPISlave,}SPIType;// Define SPI attributetypedef struct SpiStruct{ unsigned int ui_CS; unsigned int ui_SCLK; unsigned int ui_MOSI; unsigned int ui_MISO; SPIMode spiMode; SPIType spiType;}Spi_t;// Function prototypesvoid v_SPIInitSimulate(Spi_t* p_Spi);void v_CSIsEnableSimulate(Spi_t* p_Spi, int i_IsEnable);void v_SPIWriteSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength);void v_SPIReadSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength);// Define SPI pinsSpi_t Spi_0 = { .ui_CS = CS, .ui_SCLK = SCLK, .ui_MOSI = MOSI, .ui_MISO = MISO, .spiMode = Mode_1, .spiType = SPIMaster,};/*Brief: SPI protocol initiateInput: p_Spi, which spi useOutput: NoneReturn: NoneAuthor: Andy Lai*/void v_SPIInitSimulate(Spi_t* p_Spi){ assert(p_Spi != NULL); if(p_Spi->spiMode == SPIMaster) { ioport_set_pin_dir(p_Spi->ui_CS, IOPORT_DIR_OUTPUT); ioport_set_pin_dir(p_Spi->ui_SCLK, IOPORT_DIR_OUTPUT); ioport_set_pin_dir(p_Spi->ui_MOSI, IOPORT_DIR_OUTPUT); ioport_set_pin_dir(p_Spi->ui_MISO, IOPORT_DIR_INPUT); } else { ioport_set_pin_dir(p_Spi->ui_CS, IOPORT_DIR_INPUT); ioport_set_pin_dir(p_Spi->ui_SCLK, IOPORT_DIR_INPUT); ioport_set_pin_dir(p_Spi->ui_MOSI, IOPORT_DIR_INPUT); ioport_set_pin_dir(p_Spi->ui_MISO, IOPORT_DIR_OUTPUT); } pio_set_pin_high(p_Spi->ui_CS); switch(p_Spi->spiMode) { case Mode_1: case Mode_2: pio_set_pin_low(p_Spi->ui_SCLK); break; case Mode_3: case Mode_4: pio_set_pin_high(p_Spi->ui_SCLK); break; }}/*Brief: CS low level signal enable and high level signal disableInput: (1)p_Spi, which spi use (2)i_IsEnable, Chip select(Slave select) enable flagOutput: NoneReturn: NoneAuthor: Andy Lai*/void v_CSIsEnableSimulate(Spi_t* p_Spi, int i_IsEnable){ assert(p_Spi != NULL); if(i_IsEnable) { pio_set_pin_low(p_Spi->ui_CS); } else { pio_set_pin_high(p_Spi->ui_CS); }}/*Brief: Use SPI to write a byte dataInput: (1)p_Spi, which spi use (2)uc_Bt, write byte dataOutput: NoneReturn: NoneAuthor: Andy Lai*/static void v_SPIWriteByte(Spi_t* p_Spi, unsigned char uc_Bt){ int i = 0; assert(p_Spi != NULL); switch(p_Spi->spiMode) { case Mode_1: /* Clock Polarity is 0 and Clock Phase is 0 */ pio_set_pin_low(p_Spi->ui_SCLK); for(i = 7; i >= 0; i--) { pio_set_pin_low(p_Spi->ui_SCLK); SPIDelay; pio_set_pin_high(p_Spi->ui_SCLK); if(uc_Bt & (1 << i)) { pio_set_pin_high(p_Spi->ui_MOSI); } else { pio_set_pin_low(p_Spi->ui_MOSI); } SPIDelay; } pio_set_pin_low(p_Spi->ui_SCLK); break; case Mode_2: /* Clock Polarity is 0 and Clock Phase is 1 */ pio_set_pin_low(p_Spi->ui_SCLK); for(i = 7; i >= 0; i--) { pio_set_pin_high(p_Spi->ui_SCLK); if(uc_Bt & (1 << i)) { pio_set_pin_high(p_Spi->ui_MOSI); } else { pio_set_pin_low(p_Spi->ui_MOSI); } SPIDelay; pio_set_pin_low(p_Spi->ui_SCLK); SPIDelay; } pio_set_pin_low(p_Spi->ui_SCLK); break; case Mode_3: /* Clock Polarity is 1 and Clock Phase is 0 */ pio_set_pin_high(p_Spi->ui_SCLK); for(i = 7; i >= 0; i--) { pio_set_pin_high(p_Spi->ui_SCLK); if(uc_Bt & (1 << i)) { pio_set_pin_high(p_Spi->ui_MOSI); } else { pio_set_pin_low(p_Spi->ui_MOSI); } SPIDelay; pio_set_pin_low(p_Spi->ui_SCLK); SPIDelay; } pio_set_pin_high(p_Spi->ui_SCLK); break; case Mode_4: /* Clock Polarity is 1 and Clock Phase is 1 */ pio_set_pin_high(p_Spi->ui_SCLK); for(i = 7; i >= 0; i--) { pio_set_pin_low(p_Spi->ui_SCLK); if(uc_Bt & (1 << i)) { pio_set_pin_high(p_Spi->ui_MOSI); } else { pio_set_pin_low(p_Spi->ui_MOSI); } SPIDelay; pio_set_pin_high(p_Spi->ui_SCLK); SPIDelay; } pio_set_pin_high(p_Spi->ui_SCLK); break; default: break; }}/*Brief: Use SPI protocol to write dataInput: (1)p_Spi, which spi use (2)puc_Data, write data string (3)i_DataLength, write data lengthOutput: NoneReturn: NoneAuthor: Andy Lai*/void v_SPIWriteSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength){ int i = 0; assert(p_Spi != NULL); assert(puc_Data != NULL); assert(i_DataLength > 0); v_CSIsEnableSimulate(p_Spi, 1); delay_us(8); // Write data for(i = 0; i < i_DataLength; i++) { v_SPIWriteByte(p_Spi, puc_Data[i]); } delay_us(8); v_CSIsEnableSimulate(p_Spi, 0);}/*Brief: Read a byte data from SPIInput: p_Spi, which spi useOutput: NoneReturn: Read dataAuthor: Andy Lai*/static unsigned char uc_SPIReadByte(Spi_t* p_Spi){ int i = 0; unsigned char uc_ReadData = 0; assert(p_Spi != NULL); switch(p_Spi->spiMode) { case Mode_1: /* Clock Polarity is 0 and Clock Phase is 0 */ pio_set_pin_low(p_Spi->ui_SCLK); for(i = 0; i < 8; i++) { pio_set_pin_low(p_Spi->ui_SCLK); SPIDelay; pio_set_pin_high(p_Spi->ui_SCLK); uc_ReadData = uc_ReadData << 1; uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO); SPIDelay; } pio_set_pin_low(p_Spi->ui_SCLK); break; case Mode_2: /* Clock Polarity is 0 and Clock Phase is 1 */ pio_set_pin_low(p_Spi->ui_SCLK); for(i = 0; i < 8; i++) { pio_set_pin_high(p_Spi->ui_SCLK); SPIDelay; pio_set_pin_low(p_Spi->ui_SCLK); uc_ReadData = uc_ReadData << 1; uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO); SPIDelay; } pio_set_pin_low(p_Spi->ui_SCLK); break; case Mode_3: /* Clock Polarity is 1 and Clock Phase is 0 */ pio_set_pin_high(p_Spi->ui_SCLK); for(i = 0; i < 8; i++) { pio_set_pin_high(p_Spi->ui_SCLK); SPIDelay; pio_set_pin_low(p_Spi->ui_SCLK); uc_ReadData = uc_ReadData << 1; uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO); SPIDelay; } pio_set_pin_high(p_Spi->ui_SCLK); break; case Mode_4: /* Clock Polarity is 1 and Clock Phase is 1 */ pio_set_pin_high(p_Spi->ui_SCLK); for(i = 0; i < 8; i++) { pio_set_pin_low(p_Spi->ui_SCLK); SPIDelay; pio_set_pin_high(p_Spi->ui_SCLK); uc_ReadData = uc_ReadData << 1; uc_ReadData |= pio_get_pin_value(p_Spi->ui_MISO); SPIDelay; } pio_set_pin_high(p_Spi->ui_SCLK); break; default: break; } return uc_ReadData;}/*Brief: Use SPI to read dataInput: (1)p_Spi, which SPI use; (2)i_DataLength, the length of data that need to readOutput: puc_Data, need to get dataReturn: NoneAuthor: Andy Lai*/void v_SPIReadSimulate(Spi_t* p_Spi, unsigned char* puc_Data, int i_DataLength){ int i = 0; assert(p_Spi != NULL); assert(i_DataLength > 0); v_CSIsEnableSimulate(p_Spi, 1); delay_us(8); // Read data for(i = 0; i < i_DataLength; i++) { puc_Data[i] = uc_SPIReadByte(p_Spi); } delay_us(8); v_CSIsEnableSimulate(p_Spi, 0);}
参考博客:
你可能感兴趣的文章
【Android】BroadcastReceiver简介和用法实例,两种注册方式 (二)
查看>>
基本工资包括绩效工资在里吗?
查看>>
ProgressBar
查看>>
扫描SD卡异步任务new AsyncTask<Integer, Integer, String>()
查看>>
搜索文件的异步任务 new AsyncTask
查看>>
详解Android中AsyncTask的使用
查看>>
SharedPreference自动保存登录信息
查看>>
Altium Designer 发现的机密
查看>>
Android 的硬件抽象层
查看>>
rm和rmdir 删除目录
查看>>
保存读取文件
查看>>
m_spinner.setAdapter(madpter);
查看>>
数据库File f = new File("/sdcard/ouling/OuLing.db");// 创建文件
查看>>
DB_helper extends SQLiteOpenHelper
查看>>
Ex_dbActivity extends Activity
查看>>
thinking in java中谈到异常
查看>>
android sqlite3 adb命令学习
查看>>
如何成为强大的程序员?
查看>>
ex_musicPlayer
查看>>
学习说话录音播放
查看>>